

В июле 2020 года с Земли к Марсу стартовали три межпланетных аппарата: 19 июля с японского космодрома Танэгасима на ракете-носителе H-IIA — автоматическая межпланетная станция «Аль-Амаль» (Объединенные Арабские Эмираты), 23 июля с космодрома Вэньчан с помощью РН «Чанчжэн-5» — АМС «Тяньвэнь-1» (Китайская Народная Республика), 30 июля с пусковой площадки SLC-41 мыса Канаверал на РН «Атлас V-541» — АМС «Марс-2020» с ровером «Персеверанс» (Соединенные Штаты Америки) [1].
Аппаратам потребовалось немногим больше полугода, чтобы достигнуть Марса.
Первой, 9 февраля, на высокую орбиту возле Марса вышла арабская станция «Аль-Амаль», что в переводе значит «Надежда» [2]. Операции по торможению выполнялись в автоматическом режиме с задержкой сигнала около 11 минут. Такова особенность всех дальних космических полетов, когда специалистам центров управления нужно ждать информацию об уже случившихся событиях или, напротив, отправлять команды, зная, что исполнены они будут позже (временной промежуток меняется в зависимости от взаимного положения планет).
После выхода на промежуточную орбиту аппарат начал проверки бортовых систем и постепенный переход на рабочую орбиту 20 тыс. на 43 тыс. км, удобную для наблюдения полного суточного цикла Красной планеты. Все подготовительные операции должны завершиться к маю 2021 года.
С помощью трех научных приборов, созданных совместно с научными организациями США, — инфракрасного спектрометра EMIRS, многодиапазонной фотокамеры EXI с разрешением до 8 км и ультрафиолетового спектрометра EMUS — арабские специалисты соберут данные о динамике разных слоев марсианской атмосферы и о ее взаимодействии с солнечным ветром. 14 февраля 2021 года зонд отправил свой первый снимок Марса с высоты 25 тыс. км над поверхностью планеты.
Интересно, что заместителем главы первой арабской марсианской миссии и одновременно научным руководителем программы «Аль-Амаль» является Сара аль-Амири, министр по развитию высоких технологий ОАЭ. В основную научную команду входят 11 сотрудников космического агентства ОАЭ: восемь женщин и трое мужчин.
На следующий день, 10 февраля, к Марсу прибыла китайская АМС «Тяньвэнь-1» («Вопросы к небу») [3]. Это первая марсианская миссия Китая («Инхо-1» погиб в 2011 году вместе с «Фобос-Грунтом»). Она намного более амбициозная, чем арабская.

На орбитальном аппарате «Тяньвэнь-1» установлено семь научных инструментов [4]: мультиспектральная камера MRC, которая позволит очень качественно отснять поверхность Марса; цветная камера умеренного разрешения MRC для обзорной съемки; радиолокатор для зондирования подповерхностных слоев грунта и поиска льда MOSER; минералогический спектрометр MMS для изучения ресурсов Марса; трехкомпонентный магнитометр MM; еще два прибора предназначены для изучения атмосферы и космической среды: анализатор ионов и нейтральной плазмы MINPA, а также анализатор энергичных частиц MEPA для регистрации в верхних слоях атмосферы Марса электронов, протонов, альфа-частиц и тяжелых ионов до железа включительно.
Кроме того, на поверхность Красной планеты должен высадиться марсоход. Сейчас Китайское государственное космическое управление (CNSA) проводит общенациональный конкурс по выбору имени для этого аппарата.
Безымянный пока 240-килограммовый ровер с габаритными размерами 2 × 1,65 × 0,8 м имеет навигационную стереокамеру и шесть приборов. Это топографическая камера TC для построения трехмерных моделей поверхности; мультиспектральная камера MSC для изучения морфологии и распределения различных материалов; подповерхностный радар MRSER с предельной рабочей глубиной 100 м для льда и 10 м для грунта; лазерный спектрометр для дистанционного определения элементного состава и идентификации поверхностных пород MSCD; трехкомпонентный магнитометр MMFD; метеокомплекс MMM для измерения температуры, давления, скорости и направления ветра и записи звуков.
В качестве источника энергии для марсохода будут использоваться солнечные батареи. Работа на поверхности Красной планеты запланирована на 30 дней (с возможным продлением).
До мая 2021 года «Тяньвэнь-1» будет находиться на орбите ожидания для съемки и зондирования планеты, чтобы детально изучить равнину Утопия, куда высадится спускаемый модуль с ровером, а также уточнить необходимые для посадки параметры атмосферы. Если всё пойдет по плану, ближе к началу земного лета посадочный комплекс массой 1745 кг будет отделен от орбитального аппарата для спуска на поверхность Красной планеты. После этого орбитальный аппарат перейдет на рабочую орбиту наклонением 86,9° и высотой 265 × 11 943 км для долговременного изучения Марса.
Последней, 18 февраля, к Марсу прибыла американская АМС «Марс-2020» с ровером «Персеверанс» (Perseverance, «Настойчивость») [5]. Схема полета не предусматривала выхода на орбиту. Межпланетная станция зашла на посадку сразу с подлетной траектории. Первым удар на себя принял теплозащитный корпус, снизив скорость станции в атмосфере; следом раскрылся парашют, а последним в дело вступил специальный «небесный кран» — устройство, зависающее в воздухе на реактивных двигателях и спускающее марсоход к поверхности на нейлоновых тросах. Навигационная система «небесного крана» самостоятельно проанализировала поверхность перед посадкой и опустила «Персеверанс» на достаточно ровную площадку кратера Езеро [6]. Сразу после этого на Землю были переданы две черно-белые фотографии с навигационных камер, которые через 11–15 минут увидели земляне, следившие за посадкой «Настойчивости» в прямом эфире.

Ученые выяснили, что кратер Езеро в древности был заполнен водой. Он получил свое название в 2007 году в честь небольшого поселка Езеро в Боснии и Герцеговине. «Международный астрономический союз предпочитает называть небольшие кратеры, имеющие научное значение, в честь небольших городов и деревень мира», — объяснил Кен Фарли, научный сотрудник проекта Mars 2020 из Калифорнийского технологического института в Пасадене, Калифорния [7]. Слово jezero во многих славянских языках означает «озеро». Поселок Езеро расположен у озера Велико Пливско.
Западная часть марсианской равнины Исиды сложена древними и разнообразными геологическими породами: поверхность Марса в этом регионе сформировалась 3,6 млрд лет назад. По мнению ученых, в кратере Езеро располагалась дельта древней марсианской реки и там должны быть принесенные водным потоком речные отложения, где надеются обнаружить следы былой жизни на Марсе.
Масса «Персеверанса» — 1025 кг. Его габариты составляют 3 × 2,7 × 2,2 м — но это если не учитывать довольно длинную руку-манипулятор. Для перемещения по Марсу ровер оснащен шестью колесами полуметрового диаметра из алюминиевого сплава с титановыми спицами — несколько более прочными, чем похожие спицы на предыдущем марсоходе «Кьюриосити». В состав полезной нагрузки марсохода входят семь научных инструментов: камера Mastcam-Z для панорамных и стереоскопических снимков поверхности; камера-спектрометр SuperCam — инструмент для анализа химического и минералогического состава марсианских пород; рентгеновский флуоресцентный спектрометр PIXL с тепловизором, который позволит сделать самый детальный анализ элементного состава грунта на Марсе за всю историю исследований планеты; ультрафиолетовый рамановский спектрометр SHERLOC с камерой высокого разрешения; метеостанция MEDA для измерения температуры воздуха, атмосферного давления, скорости и направления ветра, относительной влажности и размера и формы частиц пыли в воздухе; радар сверхбольшого диапазона RIMFAX — георадар, предназначенный для обнаружения ближайших подповерхностных слоев пород, умеющий «заглядывать» на глубину до 10 м; манипулятор — помимо спектрометров, на нем установлен небольшой механизм, способный бурить небольшие отверстия глубиной до шести сантиметров.

Ровер имеет хорошие мультимедийные возможности: на нем целых 23 камеры для навигационных и технических операций, а для записи марсианских звуков имеется два микрофона. Первый специальный внешний микрофон записывал звуки во время посадки: срабатывание пиротехнических средств, двигателей «небесного крана», ветер в атмосфере Марса и мягкий удар о поверхность. Второй микрофон установлен на камере-спектрометре SuperCam, предназначенной для анализа химического и минералогического состава марсианских пород. Микрофон будет улавливать звуки лазера, превращающего грунт и камни в плазму; это даст дополнительные сведения об их свойствах, включая твердость. Интересно, что на китайском марсоходе тоже есть микрофон, но ровер NASA, скорее всего, передаст запись звуков на Марсе раньше.
Впервые звук на поверхности другой планеты записали советские автоматические станции «Венера-13» и «Венера-14» в 1982 году. А в 2004 году европейский зонд «Гюйгенс», отделившись от американской межпланетной станции «Кассини» и совершив посадку на спутник Сатурна Титан, во время спуска в атмосфере с помощью внешнего микрофона записал звук ветра [8].
Кроме того, на марсоходе установлена необычная экспериментальная установка MOXIE, которая будет получать кислород из углекислого газа, содержащегося в марсианской атмосфере. Эта технология может пригодиться будущим экипажам пилотируемых экспедиций на Марс.
В качестве основного источника энергии для ровера «Персеверанс» используется радиоизотопный термоэлектрический генератор (РИТЭГ) на плутонии-238 мощностью 110 Вт. Помимо этого, ровер также оснащен двумя заряжаемыми от Солнца литийионными батареями: они будут помогать при выполнении научных операций, когда потребление марсоходом энергии может возрастать до 900 кВт × ч.
Также на борту ровера впервые находится настоящий марсианский дрон «Инженьюити» (Ingenuity, «Изобретательность»). Две лопасти диаметром 120 см, 2 кг массы, сложная система вывода из-под под брюха марсохода на поверхность — дрон должен стать первым вертолетом на другой планете и первым атмосферным летательным аппаратом на Марсе [9]. Первый полет вертолета должен состояться уже через два-три месяца после посадки. «Инженьюити» не имеет научных приборов и не является частью научной миссии «Персеверанс». Цель дрона — чисто инженерная: продемонстрировать полет винтокрылого аппарата в чрезвычайно тонкой атмосфере Марса, плотность которой составляет всего около 1% от плотности нашей земной атмосферы. После отсоединения от марсохода вертолет будет действовать по командам с Земли, переданным через спутник-ретранслятор и базовую станцию Mars Helicopter Base Station на марсоходе. Электропитание будет осуществляться с помощью собственных панелей солнечных батарей. Самым опасным фактором для вертолета его разработчики считают холодные ночи на Марсе.
Основная цель миссии «Персеверанс» на Марсе — астробиологические исследования, включая поиск признаков древней микробной жизни. Также марсоход будет изучать геологию планеты и ее климат в прошлом.
У миссий NASA «Персеверанс» и китайской «Тяньвэнь-1» есть похожие амбициозные продолжения. Американский ровер будет собирать интересные для ученых образцы в титановые пробирки, чтобы во время следующей миссии (в коллаборации с Европейским космическим агентством) забрать их и доставить на Землю в 2031 году. А Китай планирует доставить марсианский грунт на Землю к осени 2030 года, чтобы обогнать на несколько месяцев США и Европу.
Александр Хохлов, популяризатор космонавтики,
член Северо-Западной организации Федерации космонавтики РФ
- trv-science.ru/2020/08/marsianskoe-leto/
- emiratesmarsmission.ae/
- novosti-kosmonavtiki.ru/articles/78782.html
- novosti-kosmonavtiki.ru/articles/75042.html
- nasa.gov/perseverance
- youtu.be/rzmd7RouGrM
- jpl.nasa.gov/news/nasa-mars-mission-connects-with-bosnian-town
- esamultimedia.esa.int/images/huygens_alien_winds_descent.mp3
- youtu.be/vnH4yD0s8QM

 (8 оценок, среднее: 4,38 из 5)
(8 оценок, среднее: 4,38 из 5)
Интересно, кто нам запрещает послать на Марс радиоуправляемую машинку? Доставку сами обеспечим, а если разучились делать планетоходы, пусть китайцы помогут.
Ворам олигархам денег на яхты не хватает., а Вы — марсоходы….
Видеомонтаж НАСА посадки ровера на Марс впечатляет. Интересно, — как далеко от Персеверанса примарсились парашют и «небесный кран»?, — на первом круговом панорамном снимке их нет.
Не исключено, прав Юрий Кирпичев – с приходом демократа Джо Байдена начинается очередной взлет США — круче и выше биткоина, — и национальный праздник День Благодарения, похоже, станет Годом Всеобщего Благодарения.
На вирус в США наложат вето —
Спасибо Байдену за это.
Увидел ровер на Луне —
Спасибо НАСА и тебе.
А больше всех спасибо Маску —
За переделку были в сказку.
На сайте «Астрономическая картинка дня» появилось изображение места посадки Персеверанса. Ближе всех к роверу оказался «небесный кран» — чуть больше километра по прямой между ними.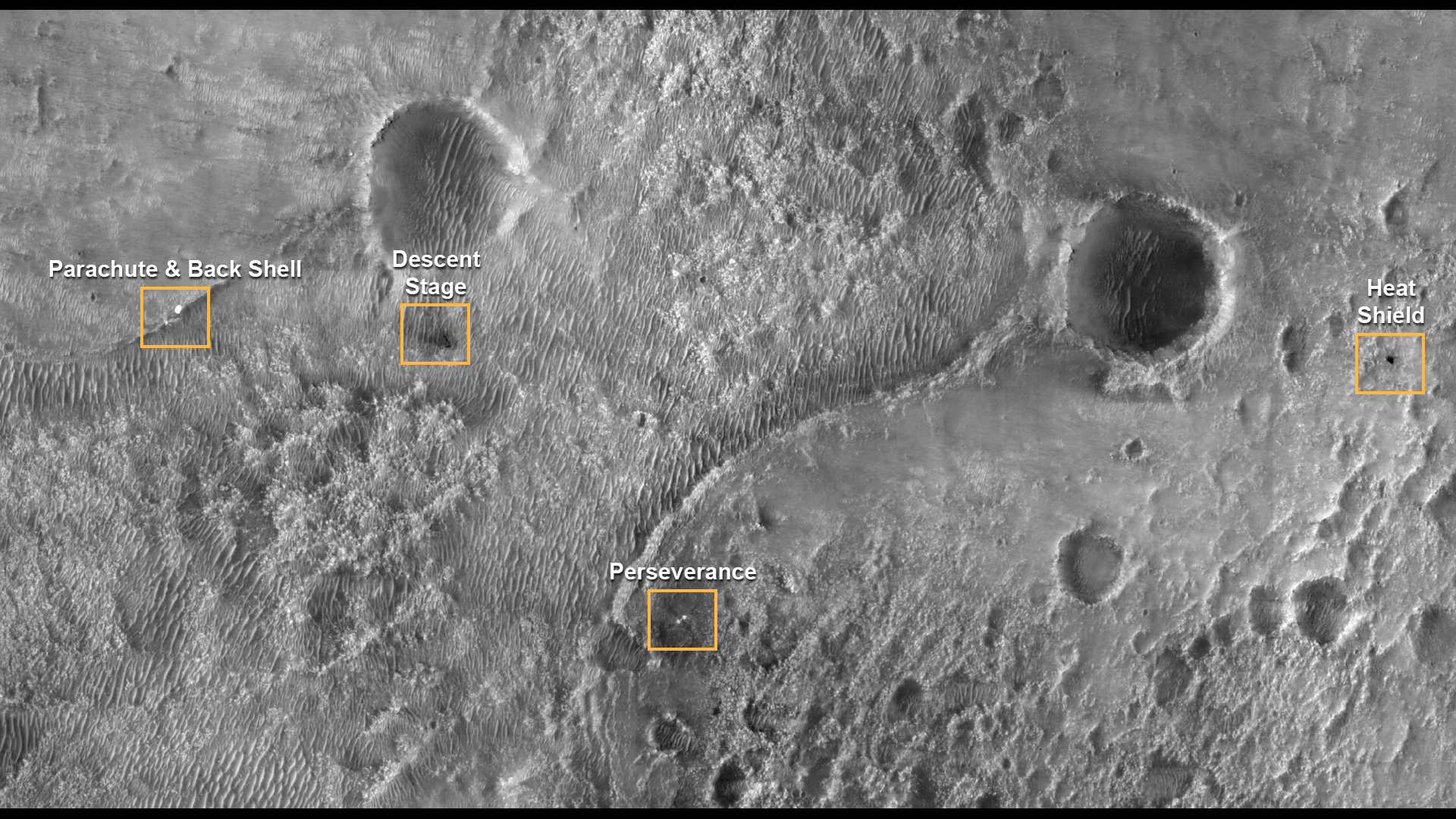
[…] the launch of the UAE’s first Martian probe, Al-Amal, is 80% women. To the main research team are included 11 employees of the UAE space agency: eight women and three […]